Global Mapping System
Published:
Overview
The Global Mapping system was a fundamental component of the Navigation Stack at Miko.AI, providing comprehensive environment mapping and localization capabilities.
Technical Details
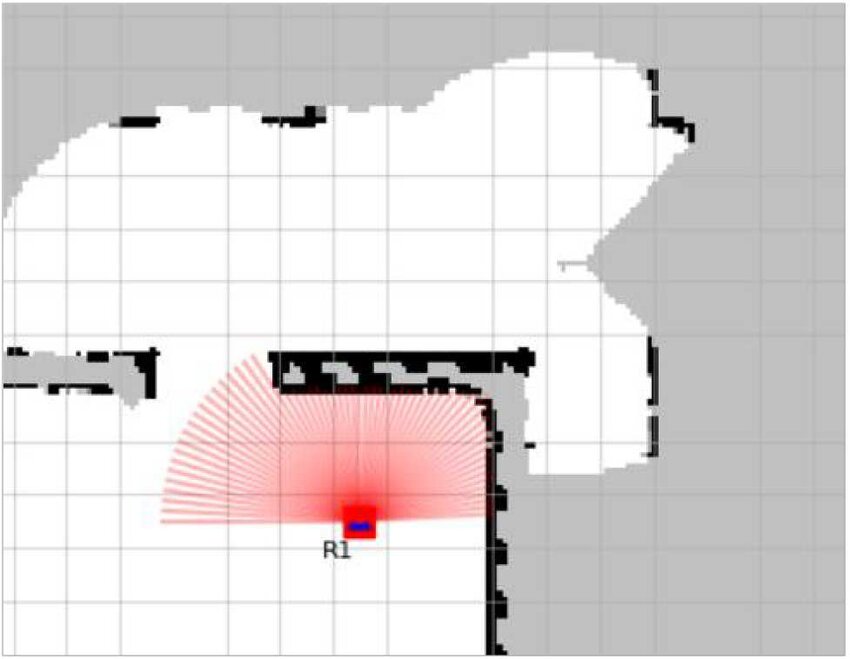
2D Occupancy Map Development
- Developed 2D occupancy maps from 3D local maps and robot pose estimates
- Implemented temporally dynamic mapping system with frame-based persistence
- Created n-frame verification system for object addition to global map
- Designed n-frame removal system for dynamic object handling
- Enabled adaptive map updates for movable objects like chairs and furniture
- Prevented map corruption from temporary obstacles or moved objects