Global Planning System
Published:
Overview
As part of the Navigation Stack project at Miko.AI, I developed the Global Planning system, a crucial component that handles high-level path planning for autonomous navigation.
Technical Details
Algorithm Implementation
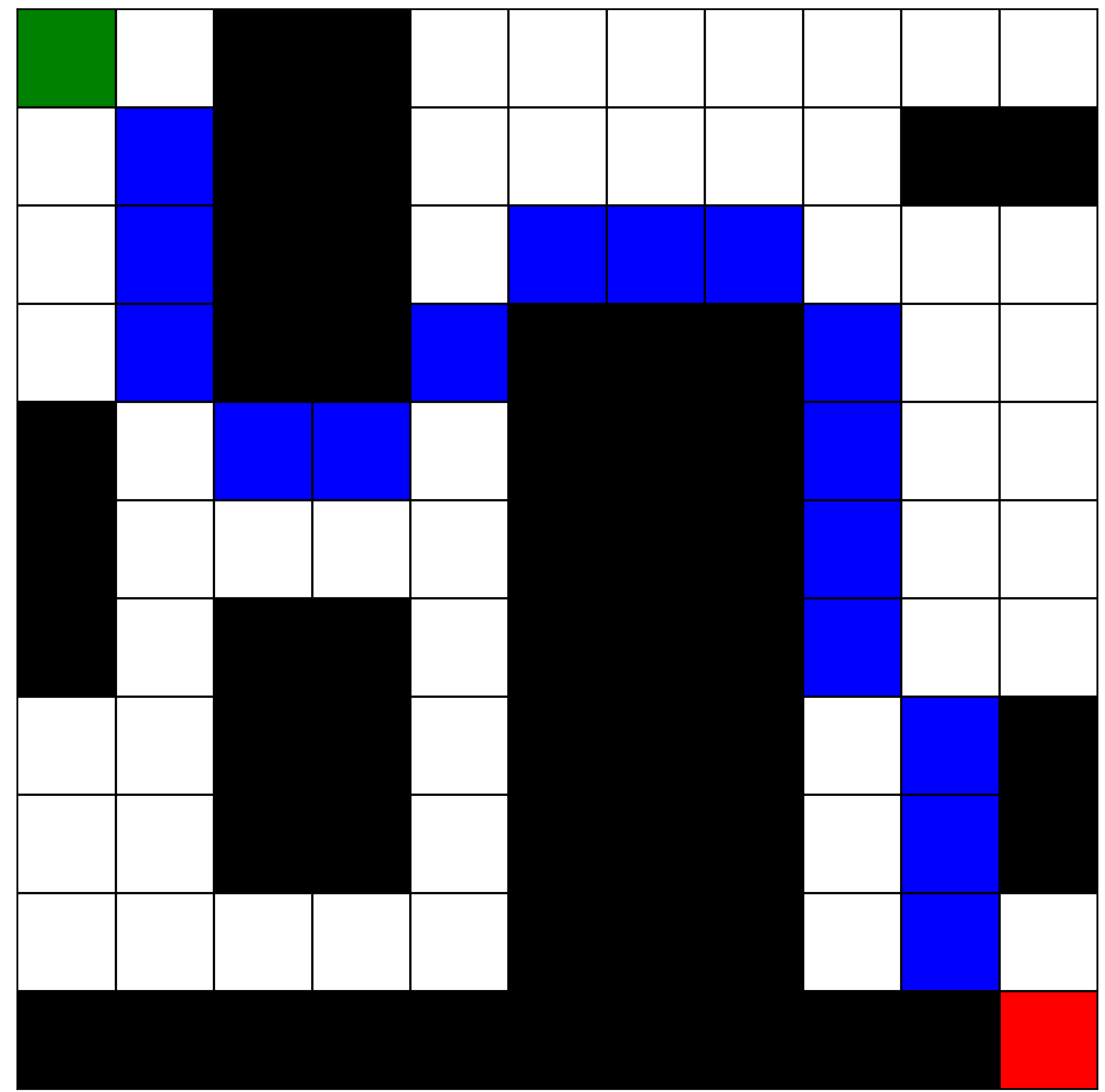
- Developed and optimized A* algorithm implementation for efficient pathfinding
- Optimized it further for mid-path route recalculation by implementing the D* algorithm.
- Created custom heuristic functions to improve path optimization
- Designed flexible cost functions to account for various environmental factors
Dynamic Route Generation
- Built a D* system for dynamic route recalculation based on environmental changes
- Implemented efficient graph-based representation of the environment
- Created waypoint generation system for complex paths
- Developed path smoothing algorithms for natural movement