Local Planning System
Published:
Overview
As a key component of the Navigation Stack at Miko.AI, the Local Planning system provided reactive path planning and real-time trajectory generation for immediate navigation challenges.
Technical Details
Real-time Navigation
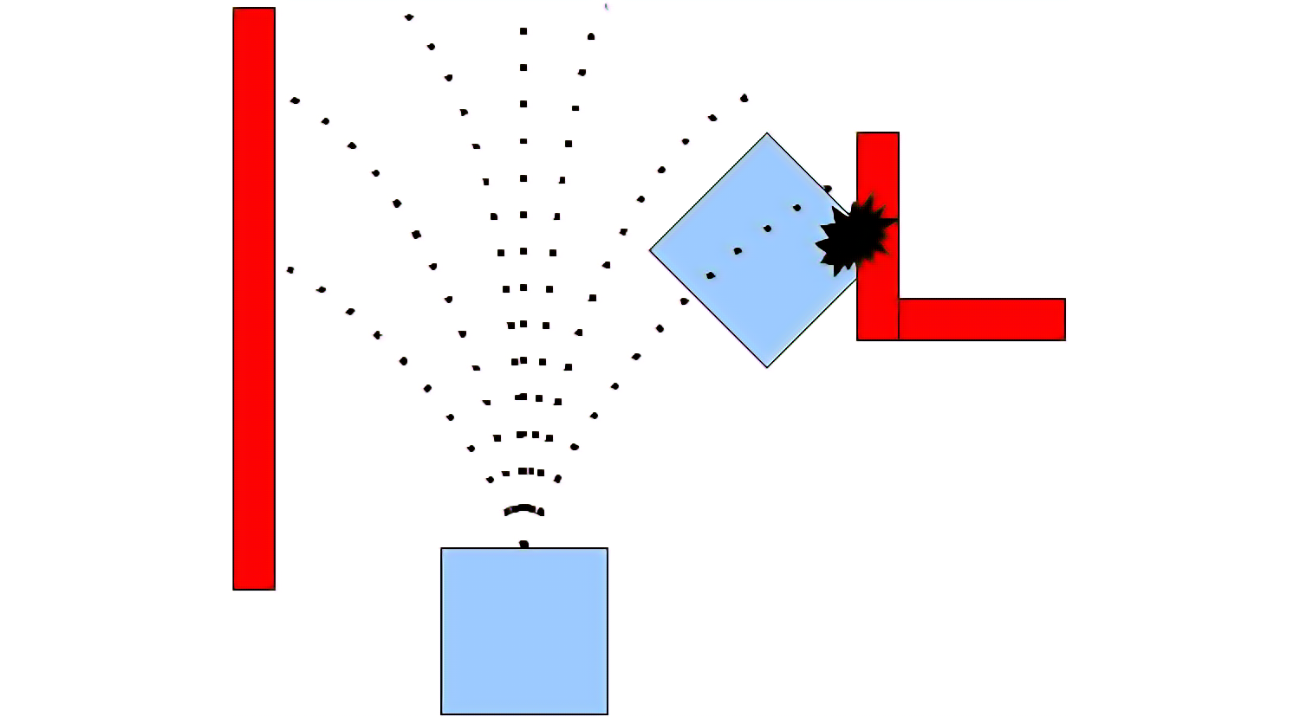
- Implemented Dynamic Window Approach (DWA) for trajectory generation
- Developed novel cost function for trajectory optimization
- Designed smooth acceleration and deceleration profiles
Obstacle Avoidance
- Developed collision prediction and avoidance systems
- Implemented reactive behavior patterns for unexpected obstacles and recovery behavioours in case collision does occur.
- Created emergency stop protocols for safety
- Designed safety zone calculations
System Integration
- Integrated with RGBD/Time-of-Flight sensor systems for real-time obstacle detection
- Created seamless handoffs with global planning system
- Developed efficient communication with local mapping
- Implemented real-time performance monitoring