Local Mapping System
Published:
Overview
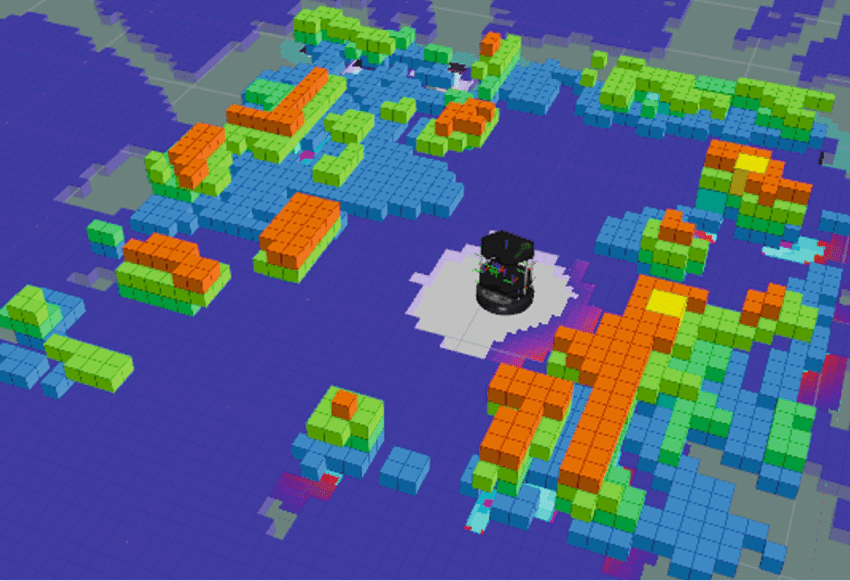
The Local Mapping system provided critical real-time environment perception capabilities for the Navigation Stack at Miko.AI, enabling immediate awareness of the robot’s surroundings.
Technical Details
Cyclic Buffer 3D Voxel System
- Implemented cyclic buffer of 3D voxels for efficient real-time mapping
- Maintained three specialized buffer types for comprehensive spatial representation
- Designed system to avoid recalculation at each timestep through cyclic updates
- Created modified octomaps optimized for dynamic local mapping
Voxel Buffer Types
- Free Voxels: Tracked confirmed free space around the robot
- Occupied Voxels: Mapped occupied space and obstacles in the environment
- Distance Transform Voxels: Maintained closest obstacle distances for each 3D space point
- Integrated distance transform data with DWA planning for collision avoidance
Sensor Fusion
- Implemented sensor fusion algorithms for combining pointcloud data with robot pose estimate
- Developed multi-sensor calibration systems
- Designed real-time sensor data processing pipeline
System Integration
- Designed interfaces with local planning system
- Implemented real-time data sharing with global mapping
- Created performance monitoring tools