Plastic and Paper Segregation Robot - LeRobot Global Hackathon 2025
Published:
Technical Experts Award & 2nd Place Winner at Hugging Face LeRobot Global Hackathon - London 2025
Published:
Technical Experts Award & 2nd Place Winner at Hugging Face LeRobot Global Hackathon - London 2025
Published:
Implementation of an advanced eye tracking-based control system for Franka Emika Panda robot using Unity VR and ROS integration![]()
Published:
Design and implementation of a Computed Torque Control system for precise manipulator arm control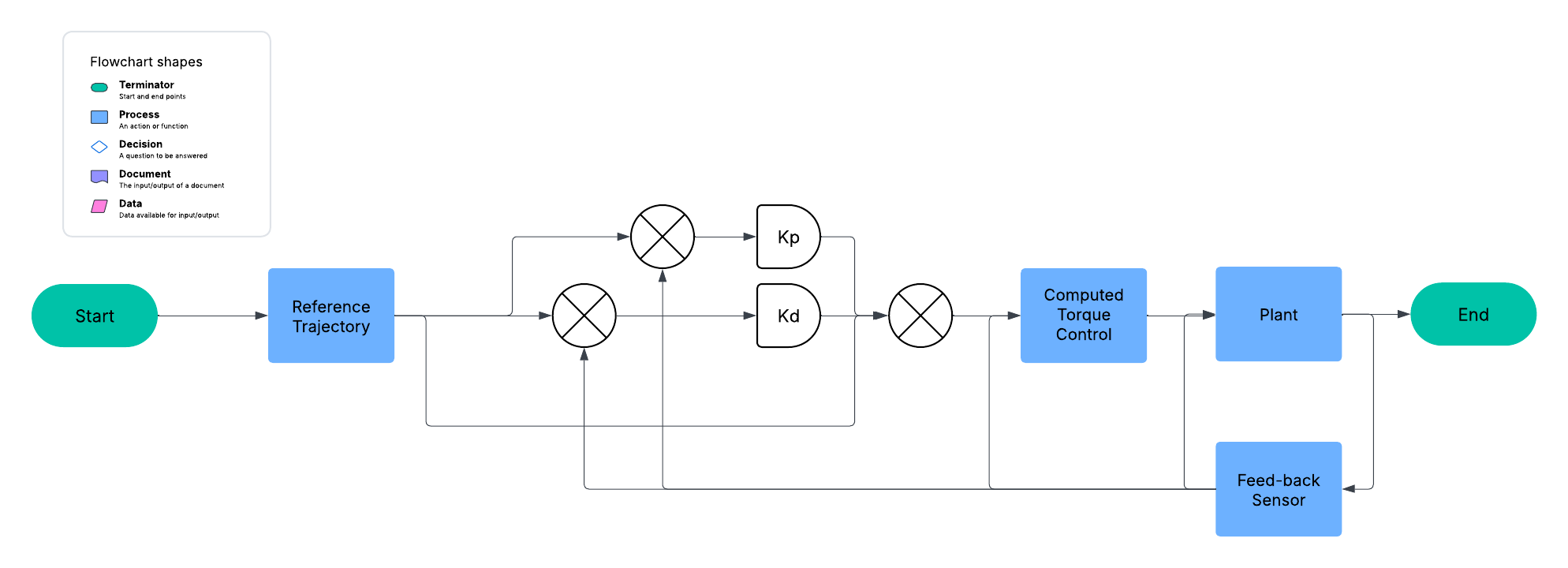
Published:
Research study investigating how human participants’ internal emotional states influence their perception of NAO robot’s emotional expressions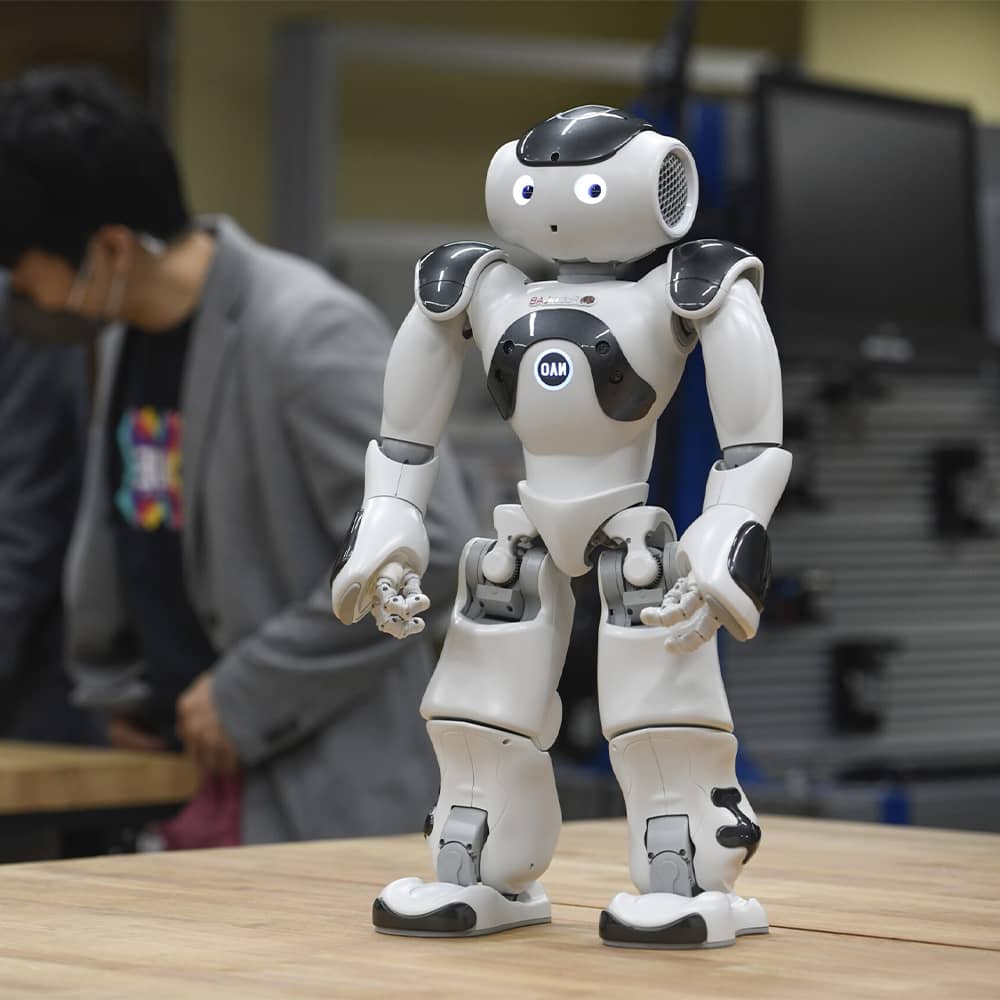
Published:
Development of an autonomous system for robotic assembly of hardware kits - Currently Working
Published in Journal 1, 2009
This paper is about the number 1. The number 2 is left for future work.
Recommended citation: Your Name, You. (2009). "Paper Title Number 1." Journal 1. 1(1).
Download Paper | Download Slides | Download Bibtex
Published in Journal 1, 2010
This paper is about the number 2. The number 3 is left for future work.
Recommended citation: Your Name, You. (2010). "Paper Title Number 2." Journal 1. 1(2).
Download Paper | Download Slides
Published in Journal 1, 2015
This paper is about the number 3. The number 4 is left for future work.
Recommended citation: Your Name, You. (2015). "Paper Title Number 3." Journal 1. 1(3).
Download Paper | Download Slides
Published in GitHub Journal of Bugs, 2024
This paper is about fixing template issue #693.
Recommended citation: Your Name, You. (2024). "Paper Title Number 3." GitHub Journal of Bugs. 1(3).
Download Paper
Published:
This is a description of your talk, which is a markdown file that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.
Published:
Development of large-scale environment mapping capabilities and SLAM implementation.
Published:
Development of high-level path planning algorithms for optimal route generation in autonomous navigation.
Published:
Development of real-time local environment mapping and obstacle detection systems.
Published:
Development of reactive path planning for immediate obstacle avoidance and real-time trajectory generation.
Published:
This is a template for a work experience entry. You can include: